Friday, 8 July 2016
Friday, 25 March 2016
Interfacing stepper motor to 8051
Interfacing stepper motor to 8051 microcontroller.
This article is about interfacing stepper motor to 8051 microcontroller. Many guys were asking here to show how to interface stepper motor to 8051 microcontroller. I think this is the time. Stepper motors are widely used in industrial, medical, consumer electronics application. In simple words, anywhere precision rotation or positioning of an object is needed.

Stepper motor.
Stepper motor is a brush less motor which converts electrical pulses into mechanical rotation. As the name indicates it rotates in steps according to the input pulses. A stepper motor usually have a number of field coils (phases) and a toothed rotor. The step size of the motor is determined by the number of phases and the number of teeth on the rotor. Step size is the angular displacement of the rotor in one step. If a stepper motor has 4 phases and 50 teeth, it takes 50×4=200 steps to make one complete rotation. So step angle will be 360/200=1.8°.
The stepper motor we are using has 4 poles and a 1/64 reduction gear mechanism for increasing torque. The step angle of the motor is 5.64°. But when considering the reduction gear, the step angle of the output shaft is 5.64/64°. The internal schematic of the stepper motor is given below.
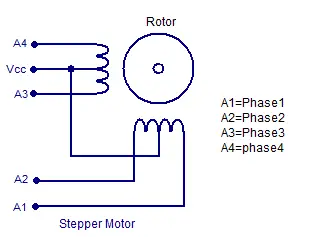
The stepper motor is rotated by switching individual phases ON for a given time one by one. The sequence is given in the graph below.

Circuit diagram.
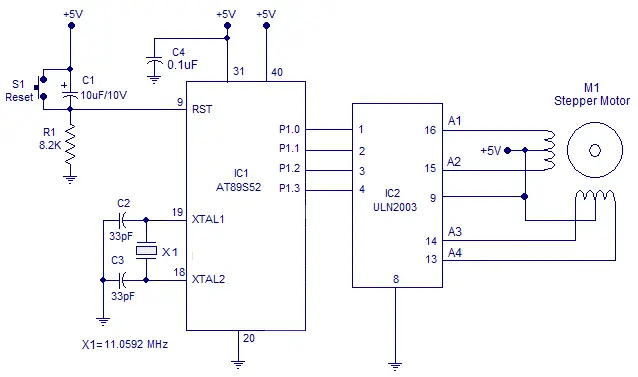 The circuit diagram for interfacing stepper motor to 8051 is shown above. P1.0, P1.1, P1.2 and P1.3 pins are used for controlling the phases A1, A2, A3 and A4 of the stepper motor respectively. ULN2003 is used for driving the individual phases of the stepper motor. ULN2003 is a darlington transistor array used for driving high current loads such as relays and motors. ULN2003 has 8 individual channels each with 1A capacity. The channels can be paralleled to increase the current capacity. Each channels are fitted with individual freewheeling diodes. The ULN2003 is operated in current sinking mode. Each channel is activated by giving a logic LOW at the corresponding input. For example if we make pin 1 of ULN2003 LOW, phase A1 of the stepper motor gets switched ON.
The circuit diagram for interfacing stepper motor to 8051 is shown above. P1.0, P1.1, P1.2 and P1.3 pins are used for controlling the phases A1, A2, A3 and A4 of the stepper motor respectively. ULN2003 is used for driving the individual phases of the stepper motor. ULN2003 is a darlington transistor array used for driving high current loads such as relays and motors. ULN2003 has 8 individual channels each with 1A capacity. The channels can be paralleled to increase the current capacity. Each channels are fitted with individual freewheeling diodes. The ULN2003 is operated in current sinking mode. Each channel is activated by giving a logic LOW at the corresponding input. For example if we make pin 1 of ULN2003 LOW, phase A1 of the stepper motor gets switched ON.Program.
A1 EQU P1.0
A2 EQU P1.1
A3 EQU P1.2
A4 EQU P1.3
ORG 00H
MOV TMOD,#00000001B
MAIN:
CLR A1
ACALL DELAY
SETB A1
CLR A2
ACALL DELAY
SETB A2
CLR A3
ACALL DELAY
SETB A3
CLR A4
ACALL DELAY
SETB A4
SJMP MAIN
DELAY:MOV R6,#1D
BACK: MOV TH0,#00000000B
MOV TL0,#00000000B
SETB TR0
HERE2: JNB TF0,HERE2
CLR TR0
CLR TF0
DJNZ R6,BACK
RET
END
The program first clears P1.0 for activating phase 1 (A1) of the stepper motor. This condition is maintained for 65mS and then P1.0 is set for deactivating phase 1 of the motor. Then the same process is repeated for the port pins P1.1 to P1.3 and the entire cycle is repeated over and over to make the motor rotate in the clockwise direction.
Timer 0 of the microcontroller is configured in Mode1 for producing the 65mS delay. 65mS is the width of each control pulse.
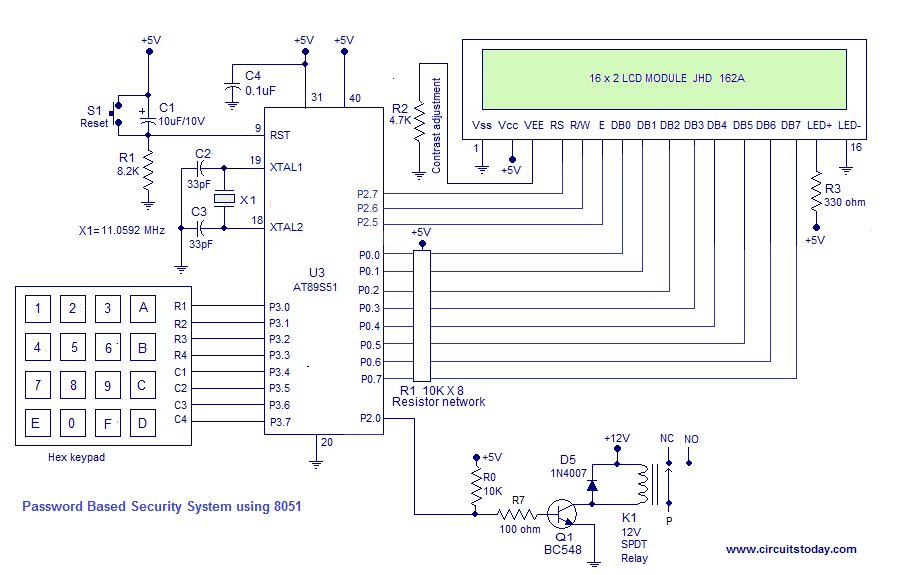
Digital Door Lock – Password based Electronic Code Lock using 8051
Digital Door Lock – Password based Electronic Code Lock using 8051
Wednesday, 23 March 2016
wirelss robot car circuit
http://www.circuitstoday.com/remote-operated-spy-robot-circuit



Remote Control Operated Spy Robot Circuit – Block Diagram

Remote Control Operated Spy Robot Circuit - Block Diagram
1. Remote Control Section
The circuit uses HT 12E, HT 12D encoder and decoder. 433MHz ASK transmitter and receiver is used for the remote control. H-bridge circuits are used for driving motors. Two 12V DC/100RPM gear motors are used as drivers. The working of the circuit is as follows.
When we are pressing any key in remote controller the HT 12E generate 8 bit address and 4 bit data .The DIP switches are used for setting the address. Then the ASK transmitter sends the 8 bit address and 4 bit data to the receiver Then the ASK receiver receives the 8 bit address and 4 bit data and HT 12D decoder decodes the data, thus enabling the appropriate output. Thus the output signals that are generated controls the H-bridge which then rotates the motors.
The 433 MHZ ASK transmitter and receivers are extremely small, and are excellent for applications requiring short-range RF remote controls. The transmitter module is only 1/3rd the size of a standard postage stamp, and can easily be placed inside a small plastic enclosure. The transmitter output is up to 8mW at 433.92MHz. The transmitter accepts both linear and digital inputs and can operate from 1.5 to 12 Volts-DC, and makes building a miniature hand-held RF transmitter very easy. The 433 MHZ ASK transmitters is approximately the size of a standard postage stamp
433 MHZ ASK receivers also operate at 433.92MHz, and have a sensitivity of 3uV. The receiver operates from 4.5 to 5.5 volts-DC.

Remote-Control-Operated-Spy-Robot-Circuit-Remote-Control-Section
2. Video Transmission Section
In this project we are using a wireless CCD camera. Now these types of cameras are commonly available in the market. It works on 12VDC supply.
To know more about CCD camera, click on the link below.
TAKE A LOOK : CHARGE COUPLED DEVICES (CCD)
The 12 Volt DC supply is taken from the battery placed in the robot. The camera has a receiver, which is placed in the remote station. Its output signals are in the form of audio and video. These signals are directly connected to a TV receiver or a computer through a tuner card.

Remote Operated Spy Robot - Remote Control Section
Components Required
| IC | HT 12E | 1 |
| HT 12D | 1 | |
| LM 7805 | 2 | |
| TRANSISTOR | TIP 127 | 4 |
| TIP 122 | 4 | |
| S 8050 | 4 | |
| DIODE | 1N 4148 | 8 |
| RESISTOR | 1K | 4 |
| 220E | 4 | |
| 39K | 1 | |
| 1M | 1 | |
| ASK TRANSMITTER | 433 MHz | 1 |
| ASK RECEIVER | 433 MHz | 1 |
| DIP SWITCH | 2 | |
| PUSH TO ON SWITCH | 4 | |
| GEAR MOTOR | 12V DC 100rpm | 2 |
| BATTERY | 12V 1.3 Ah rechargeable | 1 |
| 9V | 1 | |
| WIRELESS CCD CAMERA | 1 |
Construction
The steps for the construction are…
1. Take a hylam sheet with (20cm*15cm) size.
2. Fix two gear motors (12VDC 100rpm) in the hylam sheet by using aluminum pieces and nut bolts as shown in the figure below.
3. Fix the ball castor as shown in the figure below.
- Construction of Remote Operated Spy Robot Circuit

4. Then fix the battery (12VDC 1.2Ah) on the top of the spy robot as shown in the figure below.
- Construction of Remote Operated Spy Robot Circuit – Top View

5. Connect two motors to the PCB. The PCB is then connected to the battery.
6. Connect the wireless CCD camera to the battery.
7. Connect the camera receiver to the TV or computer. Video information’s will thus appear in the screen.
8. Switch on the remote controller and control the spy robot.
Friday, 18 March 2016




Thursday, 17 March 2016


op amp 741 page 2
NON-INVERTING AND INVERTING 741 AMPLIFIERS
V. Ryan © 2002-09
| PDF FILE - CLICK HERE FOR PRINTABLE WORKSHEET | |
1. An inverting amplifier - Leg two is the input and the output is always reversed or inverted.
2. A Non-inverting amplifier - Leg three is the input and the output is not reversed. | |
Opposite is a diagram of an INVERTING AMPLIFIER. This means that if the voltage going into the 741 chip is positive, it is negative when it comes out of the 741. In other words it reverses polarity (inverts polarity).
Two resistors are needed to make the 741 work as an amplifier, R1 and R2. In most text books diagrams like this are used to represent the 741. |  |
HOW TO CALCULATE THE 'GAIN'
An operational amplifiers purpose is to amplify a weak signal and this is called the GAIN. | |
INVERTING AMPLIFIER
GAIN (AV) = -R2 / R1 Example : if R2 is 100 kilo-ohm and R1 is 10 kilo-ohm the gain would be : -100 / 10 = -10 (Gain AV) If the input voltage is 0.5v the output voltage would be : 0.5v X -10 = -5v |
NON-INVERTING AMPLIFIER
GAIN (AV) = 1+(R2 / R1) Example : if R2 is 1000 kilo-ohm and R1 is 100 kilo-ohm the gain would be : 1+ (1000/100) = 1 + 10 OR GAIN (AV) = 11 If the input voltage is 0.5v the output voltage would be : 0.5 X 11 = 5.5v |
 | |
The polarity of a signal is reversed at the output, pin six.
A negative input becomes a positive output. |
A signal applied keeps its polarity at the output, pin six.
A positive input remains a positive output |
Op amp 741 Basic
THE 741 OPERATIONAL AMPLIFIER
The Operational Amplifier is probably the most versatile Integrated Circuit available. It is very cheap especially keeping in mind the fact that it contains several hundred components. The most common Op-Amp is the 741 and it is used in many circuits.
The OP AMP is a ‘Linear Amplifier’ with an amazing variety of uses. Its main purpose is to amplify (increase) a weak signal - a little like a Darlington Pair.
The OP-AMP has two inputs, INVERTING ( - ) and NON-INVERTING (+), and one output at pin 6. | |
 | |
The chip can be used in a circuit in two ways. If the voltage goes into pin two then it is known as an INVERTING AMPLIFIER.
If the voltage goes into pin three then the circuit becomes a NON-INVERTING AMPLIFIER. | |
 |
The 741 integrated circuit looks like any other ‘chip’. However, it is a general purpose OP-AMP. You need only to know basic information about its operation and use. The diagram opposite shows the pins of the 741 OP-AMP. The important pins are 2, 3 and 6 because these represent inverting, non-inverting and voltage out. Notice the triangular diagram that represents an Op-Amp integrated circuit.
|
THE 741 IS USED IN TWO WAYS
| |
1. An inverting amplifier. Leg two is the input and the output is always reversed.
In an inverting amplifier the voltage enters the 741 chip through leg two and comes out of the 741 chip at leg six. If the polarity is positive going into the chip, it negative by the time it comes out through leg six. The polarity has been ‘inverted’. 2. A non-inverting amplifier. Leg three is the input and the output is not reversed. In a non-inverting amplifier the voltage enters the 741 chip through leg three and leaves the 741 chip through leg six. This time if it is positive going into the 741 then it is still positive coming out. Polarity remains the same. | |
Sunday, 13 March 2016
Line Follower widout microcntrolr
Line follower is an autonomous robot which follows either black line in white area or white line in black area. Robot must be able to detect particular line and keep following it.
For special situations such as cross over’s where robot can have more than one path which can be followed, predefined path must be followed by the robot.
Line following is a task in which robot has to follow the line. It must be capable of taking various degrees of turns to follow the curved lines also.

Image: Line Follower Robot without Microcontroller
The Line following Robot moves to follow a line drawn on the floor. This Robot follows the black line which is drawn over the white surface .The line sensors are used to sense the line. When the signal falls on the white surface, it gets reflected and if it falls on the black surface, it is not reflected this principle is used to scan the Lines for the Robot.
The Robot should be capable of taking various degrees of turns and must be insensitive to environmental factors such as lighting and noise.

Saturday, 12 March 2016

IR sesor Cicuit Diagram
http://www.electronicshub.org/ir-sensor/









- Near infrared region — 700 nm to 1400 nm — IR sensors, fiber optic
- Mid infrared region — 1400 nm to 3000 nm — Heat sensing
- Far infrared region — 3000 nm to 1 mm — Thermal imaging
The frequency range of infrared is higher than microwave and lesser than visible light.
For optical sensing and optical communication, photo optics technologies are used in the near infrared region as the light is less complex than RF when implemented as a source of signal. Optical wireless communication is done with IR data transmission for short range applications.
An infrared sensor emits and/or detects infrared radiation to sense its surroundings.
The working of any Infrared sensor is governed by three laws: Planck’s Radiation law, Stephen – Boltzmann law and Wien’s Displacement law.
Planck’s law states that “every object emits radiation at a temperature not equal to 00K”. Stephen – Boltzmann law states that “at all wavelengths, the total energy emitted by a black body is proportional to the fourth power of the absolute temperature”. According to Wien’s Displacement law, “the radiation curve of a black body for different temperatures will reach its peak at a wavelength inversely proportional to the temperature”.
The basic concept of an Infrared Sensor which is used as Obstacle detector is to transmit an infrared signal, this infrared signal bounces from the surface of an object and the signal is received at the infrared receiver.
There are five basic elements used in a typical infrared detection system: an infrared source, a transmission medium, optical component, infrared detectors or receivers and signal processing. Infrared lasers and Infrared LED’s of specific wavelength can be used as infrared sources. The three main types of media used for infrared transmission are vacuum, atmosphere and optical fibers. Optical components are used to focus the infrared radiation or to limit the spectral response. Optical lenses made of Quartz, Germanium and Silicon are used to focus the infrared radiation. Infrared receivers can be photodiodes, phototransistors etc. some important specifications of infrared receivers are photosensitivity, detectivity and noise equivalent power. Signal processing is done by amplifiers as the output of infrared detector is very small.
Types of IR Sensors
Infrared sensors can be passive or active. Passive infrared sensors are basically Infrared detectors. Passive infrared sensors do not use any infrared source and detects energy emitted by obstacles in the field of view. They are of two types: quantum and thermal. Thermal infrared sensors use infrared energy as the source of heat and are independent of wavelength. Thermocouples, pyroelectric detectors and bolometers are the common types of thermal infrared detectors.
Quantum type infrared detectors offer higher detection performance and are faster than thermal type infrared detectors. The photosensitivity of quantum type detectors is wavelength dependent. Quantum type detectors are further classified into two types: intrinsic and extrinsic types. Intrinsic type quantum detectors are photoconductive cells and photovoltaic cells.
Active infrared sensors consist of two elements: infrared source and infrared detector. Infrared sources include an LED or infrared laser diode. Infrared detectors include photodiodes or phototransistors. The energy emitted by the infrared source is reflected by an object and falls on the infrared detector.

IR Transmitter
Infrared Transmitter is a light emitting diode (LED) which emits infrared radiations. Hence, they are called IR LED’s. Even though an IR LED looks like a normal LED, the radiation emitted by it is invisible to the human eye.
The picture of a typical Infrared LED is shown below.

There are different types of infrared transmitters depending on their wavelengths, output power and response time.
A simple infrared transmitter can be constructed using an infrared LED, a current limiting resistor and a power supply. The schematic of a typical IR transmitter is shown below.
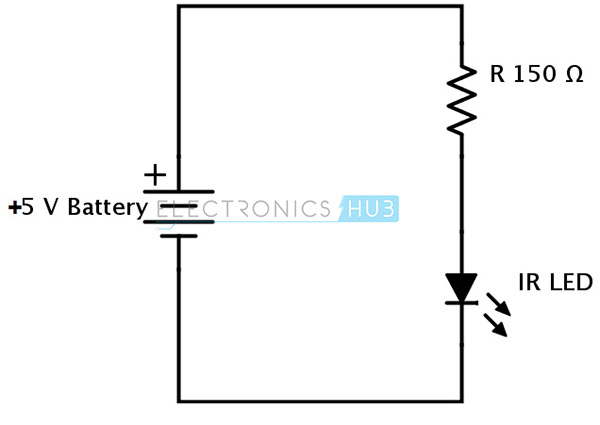
When operated at a supply of 5V, the IR transmitter consumes about 3 to 5 mA of current. Infrared transmitters can be modulated to produce a particular frequency of infrared light. The most commonly used modulation is OOK (ON – OFF – KEYING) modulation.
IR transmitters can be found in several applications. Some applications require infrared heat and the best infrared source is infrared transmitter. When infrared emitters are used with Quartz, solar cells can be made.
IR Receiver
Infrared receivers are also called as infrared sensors as they detect the radiation from an IR transmitter. IR receivers come in the form of photodiodes and phototransistors. Infrared Photodiodes are different from normal photo diodes as they detect only infrared radiation. The picture of a typical IR receiver or a photodiode is shown below.

Different types of IR receivers exist based on the wavelength, voltage, package, etc. When used in an infrared transmitter – receiver combination, the wavelength of the receiver should match with that of the transmitter.
A typical infrared receiver circuit using a phototransistor is shown below.
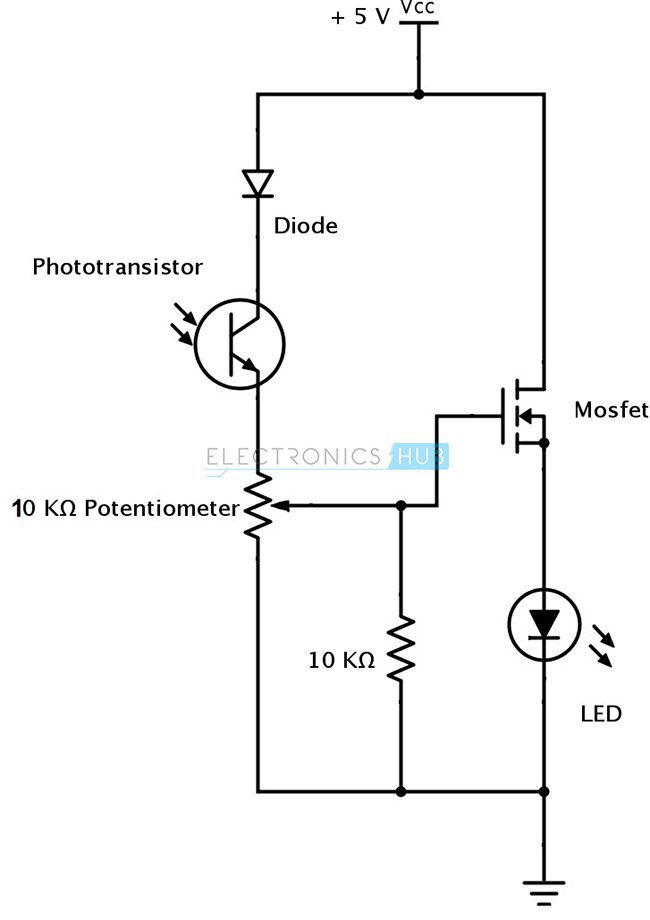
It consists of an IR phototransistor, a diode, a MOSFET, a potentiometer and an LED. When the phototransistor receives any infrared radiation, current flows through it and MOSFET turns on. This in turn lights up the LED which acts as a load. The potentiometer is used to control the sensitivity of the phototransistor.
Principle of Working
The principle of an IR sensor working as an Object Detection Sensor can be explained using the following figure. An IR sensor consists of an IR LED and an IR Photodiode; together they are called as Photo – Coupler or Opto – Coupler.
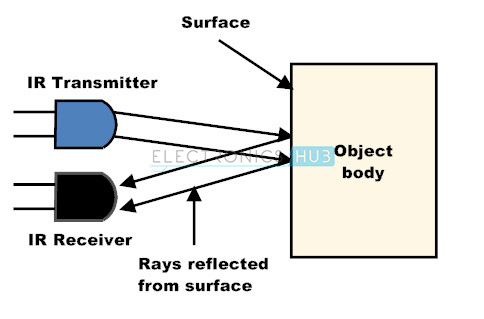
When the IR transmitter emits radiation, it reaches the object and some of the radiation reflects back to the IR receiver. Based on the intensity of the reception by the IR receiver, the output of the sensor is defined.
Obstacle Sensing Circuit or IR Sensor Circuit
A typical IR sensing circuit is shown below.
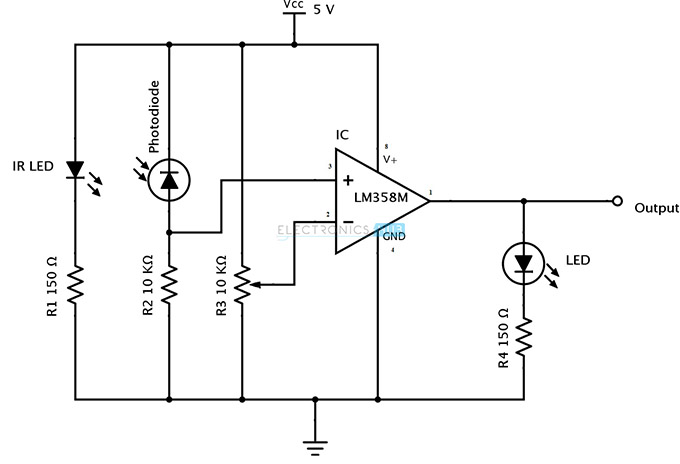
It consists of an IR LED, a photodiode, a potentiometer, an IC Operational amplifier and an LED.
IR LED emits infrared light. The Photodiode detects the infrared light. An IC Op – Amp is used as a voltage comparator. The potentiometer is used to calibrate the output of the sensor according to the requirement.
When the light emitted by the IR LED is incident on the photodiode after hitting an object, the resistance of the photodiode falls down from a huge value. One of the input of the op – amp is at threshold value set by the potentiometer. The other input to the op-amp is from the photodiode’s series resistor. When the incident radiation is more on the photodiode, the voltage drop across the series resistor will be high. In the IC, both the threshold voltage and the voltage across the series resistor are compared. If the voltage across the resistor series to photodiode is greater than that of the threshold voltage, the output of the IC Op – Amp is high. As the output of the IC is connected to an LED, it lightens up. The threshold voltage can be adjusted by adjusting the potentiometer depending on the environmental conditions.
The positioning of the IR LED and the IR Receiver is an important factor. When the IR LED is held directly in front of the IR receiver, this setup is called Direct Incidence. In this case, almost the entire radiation from the IR LED will fall on the IR receiver. Hence there is a line of sight communication between the infrared transmitter and the receiver. If an object falls in this line, it obstructs the radiation from reaching the receiver either by reflecting the radiation or absorbing the radiation.
Distinguishing Between Black and White Colors
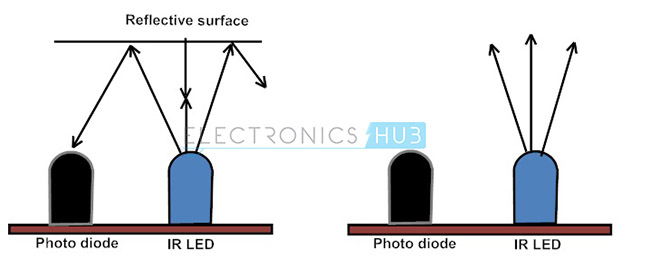
It is universal that black color absorbs the entire radiation incident on it and white color reflects the entire radiation incident on it. Based on this principle, the second positioning of the sensor couple can be made. The IR LED and the photodiode are placed side by side. When the IR transmitter emits infrared radiation, since there is no direct line of contact between the transmitter and receiver, the emitted radiation must reflect back to the photodiode after hitting any object. The surface of the object can be divided into two types: reflective surface and non-reflective surface. If the surface of the object is reflective in nature i.e. it is white or other light color, most of the radiation incident on it will get reflected back and reaches the photodiode. Depending on the intensity of the radiation reflected back, current flows in the photodiode.
If the surface of the object is non-reflective in nature i.e. it is black or other dark color, it absorbs almost all the radiation incident on it. As there is no reflected radiation, there is no radiation incident on the photodiode and the resistance of the photodiode remains higher allowing no current to flow. This situation is similar to there being no object at all.
The pictorial representation of the above scenarios is shown below.
The positioning and enclosing of the IR transmitter and Receiver is very important. Both the transmitter and the receiver must be placed at a certain angle, so that the detection of an object happens properly. This angle is the directivity of the sensor which is +/- 45 degrees.
The directivity is shown below.
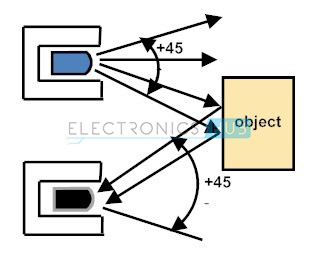
In order to avoid reflections from surrounding objects other than the object, both the IR transmitter and the IR receiver must be enclosed properly. Generally the enclosure is made of plastic and is painted with black color.
Subscribe to:
Posts (Atom)