Friday, 8 July 2016
Friday, 25 March 2016
Interfacing stepper motor to 8051
Interfacing stepper motor to 8051 microcontroller.
This article is about interfacing stepper motor to 8051 microcontroller. Many guys were asking here to show how to interface stepper motor to 8051 microcontroller. I think this is the time. Stepper motors are widely used in industrial, medical, consumer electronics application. In simple words, anywhere precision rotation or positioning of an object is needed.

Stepper motor.
Stepper motor is a brush less motor which converts electrical pulses into mechanical rotation. As the name indicates it rotates in steps according to the input pulses. A stepper motor usually have a number of field coils (phases) and a toothed rotor. The step size of the motor is determined by the number of phases and the number of teeth on the rotor. Step size is the angular displacement of the rotor in one step. If a stepper motor has 4 phases and 50 teeth, it takes 50×4=200 steps to make one complete rotation. So step angle will be 360/200=1.8°.
The stepper motor we are using has 4 poles and a 1/64 reduction gear mechanism for increasing torque. The step angle of the motor is 5.64°. But when considering the reduction gear, the step angle of the output shaft is 5.64/64°. The internal schematic of the stepper motor is given below.
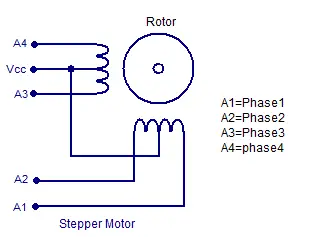
The stepper motor is rotated by switching individual phases ON for a given time one by one. The sequence is given in the graph below.

Circuit diagram.
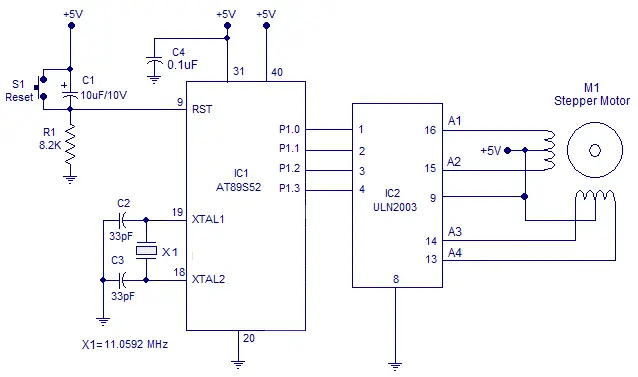 The circuit diagram for interfacing stepper motor to 8051 is shown above. P1.0, P1.1, P1.2 and P1.3 pins are used for controlling the phases A1, A2, A3 and A4 of the stepper motor respectively. ULN2003 is used for driving the individual phases of the stepper motor. ULN2003 is a darlington transistor array used for driving high current loads such as relays and motors. ULN2003 has 8 individual channels each with 1A capacity. The channels can be paralleled to increase the current capacity. Each channels are fitted with individual freewheeling diodes. The ULN2003 is operated in current sinking mode. Each channel is activated by giving a logic LOW at the corresponding input. For example if we make pin 1 of ULN2003 LOW, phase A1 of the stepper motor gets switched ON.
The circuit diagram for interfacing stepper motor to 8051 is shown above. P1.0, P1.1, P1.2 and P1.3 pins are used for controlling the phases A1, A2, A3 and A4 of the stepper motor respectively. ULN2003 is used for driving the individual phases of the stepper motor. ULN2003 is a darlington transistor array used for driving high current loads such as relays and motors. ULN2003 has 8 individual channels each with 1A capacity. The channels can be paralleled to increase the current capacity. Each channels are fitted with individual freewheeling diodes. The ULN2003 is operated in current sinking mode. Each channel is activated by giving a logic LOW at the corresponding input. For example if we make pin 1 of ULN2003 LOW, phase A1 of the stepper motor gets switched ON.Program.
A1 EQU P1.0
A2 EQU P1.1
A3 EQU P1.2
A4 EQU P1.3
ORG 00H
MOV TMOD,#00000001B
MAIN:
CLR A1
ACALL DELAY
SETB A1
CLR A2
ACALL DELAY
SETB A2
CLR A3
ACALL DELAY
SETB A3
CLR A4
ACALL DELAY
SETB A4
SJMP MAIN
DELAY:MOV R6,#1D
BACK: MOV TH0,#00000000B
MOV TL0,#00000000B
SETB TR0
HERE2: JNB TF0,HERE2
CLR TR0
CLR TF0
DJNZ R6,BACK
RET
END
The program first clears P1.0 for activating phase 1 (A1) of the stepper motor. This condition is maintained for 65mS and then P1.0 is set for deactivating phase 1 of the motor. Then the same process is repeated for the port pins P1.1 to P1.3 and the entire cycle is repeated over and over to make the motor rotate in the clockwise direction.
Timer 0 of the microcontroller is configured in Mode1 for producing the 65mS delay. 65mS is the width of each control pulse.
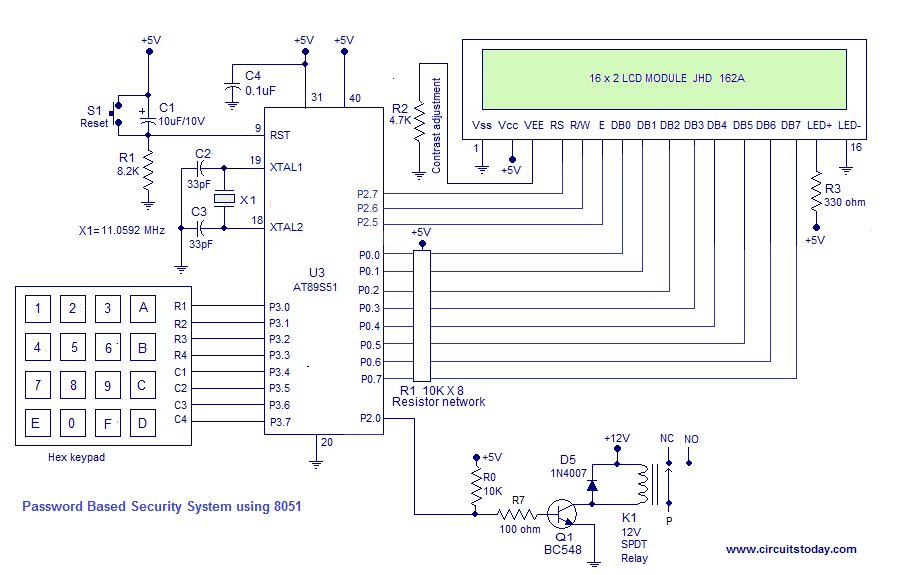
Digital Door Lock – Password based Electronic Code Lock using 8051
Digital Door Lock – Password based Electronic Code Lock using 8051
Wednesday, 23 March 2016
wirelss robot car circuit
http://www.circuitstoday.com/remote-operated-spy-robot-circuit



Remote Control Operated Spy Robot Circuit – Block Diagram

Remote Control Operated Spy Robot Circuit - Block Diagram
1. Remote Control Section
The circuit uses HT 12E, HT 12D encoder and decoder. 433MHz ASK transmitter and receiver is used for the remote control. H-bridge circuits are used for driving motors. Two 12V DC/100RPM gear motors are used as drivers. The working of the circuit is as follows.
When we are pressing any key in remote controller the HT 12E generate 8 bit address and 4 bit data .The DIP switches are used for setting the address. Then the ASK transmitter sends the 8 bit address and 4 bit data to the receiver Then the ASK receiver receives the 8 bit address and 4 bit data and HT 12D decoder decodes the data, thus enabling the appropriate output. Thus the output signals that are generated controls the H-bridge which then rotates the motors.
The 433 MHZ ASK transmitter and receivers are extremely small, and are excellent for applications requiring short-range RF remote controls. The transmitter module is only 1/3rd the size of a standard postage stamp, and can easily be placed inside a small plastic enclosure. The transmitter output is up to 8mW at 433.92MHz. The transmitter accepts both linear and digital inputs and can operate from 1.5 to 12 Volts-DC, and makes building a miniature hand-held RF transmitter very easy. The 433 MHZ ASK transmitters is approximately the size of a standard postage stamp
433 MHZ ASK receivers also operate at 433.92MHz, and have a sensitivity of 3uV. The receiver operates from 4.5 to 5.5 volts-DC.

Remote-Control-Operated-Spy-Robot-Circuit-Remote-Control-Section
2. Video Transmission Section
In this project we are using a wireless CCD camera. Now these types of cameras are commonly available in the market. It works on 12VDC supply.
To know more about CCD camera, click on the link below.
TAKE A LOOK : CHARGE COUPLED DEVICES (CCD)
The 12 Volt DC supply is taken from the battery placed in the robot. The camera has a receiver, which is placed in the remote station. Its output signals are in the form of audio and video. These signals are directly connected to a TV receiver or a computer through a tuner card.

Remote Operated Spy Robot - Remote Control Section
Components Required
| IC | HT 12E | 1 |
| HT 12D | 1 | |
| LM 7805 | 2 | |
| TRANSISTOR | TIP 127 | 4 |
| TIP 122 | 4 | |
| S 8050 | 4 | |
| DIODE | 1N 4148 | 8 |
| RESISTOR | 1K | 4 |
| 220E | 4 | |
| 39K | 1 | |
| 1M | 1 | |
| ASK TRANSMITTER | 433 MHz | 1 |
| ASK RECEIVER | 433 MHz | 1 |
| DIP SWITCH | 2 | |
| PUSH TO ON SWITCH | 4 | |
| GEAR MOTOR | 12V DC 100rpm | 2 |
| BATTERY | 12V 1.3 Ah rechargeable | 1 |
| 9V | 1 | |
| WIRELESS CCD CAMERA | 1 |
Construction
The steps for the construction are…
1. Take a hylam sheet with (20cm*15cm) size.
2. Fix two gear motors (12VDC 100rpm) in the hylam sheet by using aluminum pieces and nut bolts as shown in the figure below.
3. Fix the ball castor as shown in the figure below.
- Construction of Remote Operated Spy Robot Circuit

4. Then fix the battery (12VDC 1.2Ah) on the top of the spy robot as shown in the figure below.
- Construction of Remote Operated Spy Robot Circuit – Top View

5. Connect two motors to the PCB. The PCB is then connected to the battery.
6. Connect the wireless CCD camera to the battery.
7. Connect the camera receiver to the TV or computer. Video information’s will thus appear in the screen.
8. Switch on the remote controller and control the spy robot.
Friday, 18 March 2016




Thursday, 17 March 2016


Subscribe to:
Posts (Atom)